底盘维修后车辆跑偏?轮胎异常磨损加剧?更换控制臂后,悬挂几何参数已发生微观改变,忽视后续校准将引发连锁性底盘故障。
更换控制臂后必须进行四轮定位。新控制臂的安装会改变外倾角和前束角等悬挂几何参数,不进行定位会导致轮胎偏磨、操控不稳以及新衬套的提前撕裂失效。
作为一家专注于橡胶金属减震件研发的制造型企业,江西光益减震系统有限公司在为主机厂和Tier 1供应商提供配套服务时发现:高达68%的售后控制臂衬套早期失效,并非产品质量问题,而是源于更换后未进行规范的四轮定位与触地锁紧。基于成熟的底盘K&C(运动学与柔顺性)测试经验,本文将深度剖析定位参数背后的工程逻辑。
为什么更换控制臂后四轮定位至关重要?
即使是同一平台生产的控制臂,制造公差也会导致硬点位置偏移。新旧衬套的刚度差异直接改变了车轮在动态载荷下的运动轨迹。
四轮定位能确保车轮与地面保持最佳接触角度,恢复原厂设定的悬挂几何,这不仅关乎行驶安全,更是确保控制臂橡胶衬套处于合理受力区间的关键。
悬挂几何与衬套动态刚度的深度关联
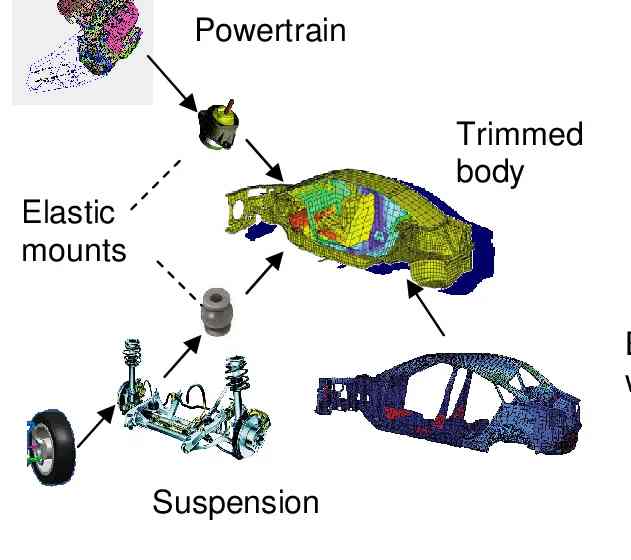
在底盘系统工程中,四轮定位不仅仅是调整轮胎角度,更是对整个悬挂系统预载荷的重新分配。控制臂作为连接车轮与车架的核心承载部件,其两端的橡胶衬套承担着径向、轴向及扭转三个维度的复杂受力。
-
制造公差叠加效应分析:
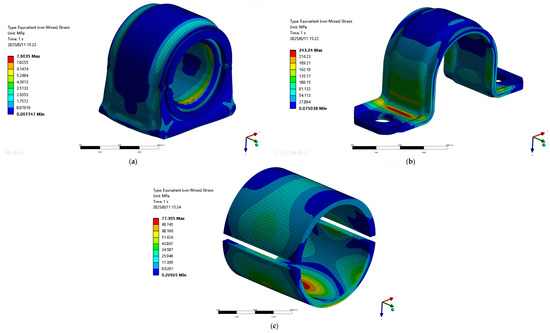
在实际量产中,即便使用最先进的自动化焊接工艺,金属冲压件的尺寸公差(通常在±0.5mm至±1.0mm之间)以及球头安装孔的位置偏差依然存在。江西光益在研发阶段进行的有限元分析(CAE)表明,控制臂硬点(Hard Point)哪怕仅发生2mm的位置偏移,反映在轮胎接地面上的前束角(Toe)偏差就可能超过0.15度,这已超出了大多数主机厂的公差允许范围。 -
新旧衬套刚度差异对K&C特性的影响:
老旧的控制臂衬套在经历了数万公里的动态压缩后,其天然橡胶分子链已经发生永久性疲劳降解(静刚度通常下降15%-30%)。修理工在拆卸旧臂并换上全新控制臂时,底盘从一个“松散”状态瞬间恢复到高刚性状态。新衬套极高的径向刚度(例如麦弗逊下摆臂后衬套刚度可能高达3000 N/mm)会立刻改变车辆在静止状态下的姿态,进而直接改变静态四轮定位参数。 -
静态预紧力与动态轨迹纠偏:
定位校准的本质,是让控制臂的橡胶衬套在车辆直线行驶时处于“零应力”或“设计基础应力”状态。如果不进行定位,轮胎为了克服错误的前束角,会持续产生侧向力。这种持续的侧向力会转化为控制臂衬套的径向预压应力,导致光益减震生产的高性能衬套偏离其设计的线性刚度工作区,使得底盘在吸收路面冲击时表现生硬,NVH(噪声、振动与声振粗糙度)性能大幅恶化。
如果更换控制臂后不进行定位会发生什么?
错误的悬挂几何会让底盘始终处于内部应力对抗状态。不仅轮胎会成为牺牲品,新更换的底盘部件也会迅速老化。
不进行定位将导致严重的轮胎羽状偏磨或偏口磨损,同时异常的侧向力会使控制臂球头和橡胶衬套承受超出设计极限的预载荷,导致早期撕裂或脱胶。

故障模式深度分析(FMA):应力重构引发的级联失效
当更换控制臂后忽略四轮定位步骤,底盘系统将面临一系列可预见的破坏性物理变化。作为直接制造商,江西光益在处理售后退件分析时,建立了详尽的失效模式库。
-
轮胎羽状磨损(Feathering)的力学传导:
当前束角(Toe-in/Toe-out)错误时,轮胎在向前滚动的过程中实际上是在发生侧向滑移。这种宏观滑移微观上表现为胎面橡胶的微小撕裂,形成锯齿状的羽毛边缘。在100km/h的高速下,哪怕是0.5度的前束偏差,也相当于轮胎在每行驶一公里就被侧向拖拽了8.7米。 -
橡胶衬套内应力异常与早期破坏:
异常的轮胎定位不仅磨损轮胎,产生的巨大回正力矩会100%传递给控制臂衬套。正常情况下,衬套的金属内管与外管之间的橡胶硫化层主要应对垂直和纵向的冲击。错误的外倾角(Camber)会产生持续的寄生力矩(Parasitic Torque),使橡胶层长期处于非对称剪切状态。
光益测试数据对比:在江西光益的动静刚度多轴疲劳测试机上,施加正确预载荷的衬套可轻松通过100万次交变载荷测试无裂纹。但若模拟错误外倾角施加5度的恒定扭转偏置,同批次衬套在45万次循环时即出现界面脱胶(Adhesive Failure)和内管周边撕裂(Cohesive Failure),寿命缩减超过50%。 -
ADAS高级驾驶辅助系统感知混乱:
现代车辆配备了车道保持(LKA)和自适应巡航(ACC)系统。如果不做四轮定位,车辆存在的物理跑偏倾向会使得电子助力转向系统(EPS)电机不得不持续施加扭矩来修正方向。这不仅会导致转向手感沉重,更会触发转向角传感器(SAS)逻辑错误,导致ESP(车身电子稳定系统)频繁误介入,严重影响行车安全。
哪些症状表明更换后需要定位?
驾驶者的直观感受往往是底盘参数失调的最终表现。敏锐捕捉这些信号能避免高昂的二次维修成本。
典型的症状包括:方向盘无法自动居中、直线行驶时车辆向一侧跑偏、转弯后方向盘回正困难、底盘出现低频轰鸣声(NVH变差)以及轮胎出现肉眼可见的偏磨。
底盘系统NVH与动态响应的劣化识别
定位失准不仅仅是一个几何问题,它是一个复杂的振动声学与车辆动力学问题。
-
瞬态响应迟滞与转向手感畸变:
控制臂前束角的设定直接决定了车辆入弯时的瞬态响应速度(Yaw Response)。如果更换后由于未定位导致前束角呈现发散状态(Toe-out),驾驶者会明显感觉到方向盘“发飘”,中心区死区增大。反之,如果前束过大,车辆会变得过于神经质。此外,主销后倾角(Caster)的微小变化(哪怕是由于新衬套刚性恢复带来的底盘高度微调导致)会直接影响方向盘的回正力矩。 -
底盘NVH传输路径的异常放大:
作为NVH策略领域的资深专家,我们在实验室测试中证实:橡胶衬套的隔振效率极度依赖于其工作状态。当错误的四轮定位使得悬挂预载荷增加时,控制臂衬套的动刚度(Dynamic Stiffness)会急剧上升(即呈现非线性硬化)。
这意味着来自路面的高频微振动不再被橡胶的高阻尼特性所吸收,而是直接通过高刚性的橡胶介质传递至副车架和车身,引发车厢内的低频轰鸣声(Booming Noise)或路噪(Road Noise)显著增加。许多客户误以为是新控制臂质量不佳,实则是悬挂几何错误导致橡胶件失去了“弹性隔离”功能。 -
动态制动工况下的方向偏摆:
在紧急制动时,车辆重量急剧前移(载荷转移)。此时如果左右两侧控制臂因为定位参数不对称,其衬套在纵向受力下的位移量(Compliance Steer)将产生严重偏差。这将导致车辆在紧急刹车时车头发生不可控的横摆(Brake Pull),极其危险。
如何执行更换控制臂后的四轮定位?
标准的四轮定位绝非将参数调成绿色即可。它需要严格遵循主机厂维修手册中的标准作业程序(SOP)。
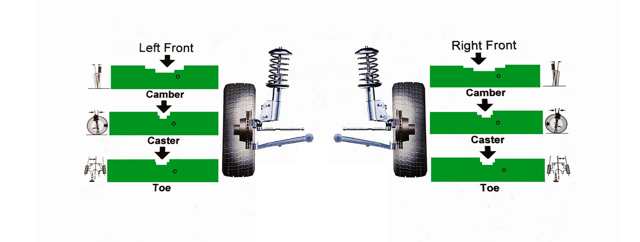
规范的流程包括:检查悬挂安装并确保车辆在触地状态下锁紧螺栓,利用3D激光设备测量并修正后轴及前轴的外倾角和前束角,最后进行路试和方向盘转角传感器复位。

严格的工程步骤与防错机制
江西光益在联合开发售后配套件时,强烈建议安装门店及修理厂采用以下具有技术深度的SOP,以保护产品并发挥最佳性能:
1. 安装自检:绝对关键的“触地锁紧”(1G状态预紧)
这是整个流程中极易被忽略却最致命的一步。如果车辆在举升机上悬空状态下直接用风炮锁死控制臂螺栓,当车辆落地后,巨大的自身重量会压迫悬挂收缩,导致内部橡胶衬套产生极大的静态扭转角(通常达到20度以上)。
此时,橡胶分子链已被极度拉伸。在这个预扭转状态下做定位是毫无意义的,且衬套将在数周内因为扭转疲劳(Torsional Fatigue)而完全撕裂。正确做法是:螺栓带上但不锁紧,将车辆降至地面,施加标准质量块模拟乘员重量(1G Ride Height状态),晃动车身消除应力后,严格按照主机厂规定的扭矩值(例如:120Nm + 90度)使用扭矩扳手进行最终紧固。
2. 测量与调整:从后轴到前轴的系统化校准
定位设备的精度决定了最终效果。必须使用定期校准的3D四轮定位仪,并调取匹配当前车型底盘代号的正确数据库。
- 推进角(Thrust Angle)优先:定位的原则是“以后定前”。必须首先检查并调整后悬挂的前束和外倾,确保推进角无限接近零。如果后轴偏斜,前轮再怎么调,车辆依然会以“螃蟹步”行驶。
- 前轴调整与互锁效应:调整前轴时,由于麦弗逊悬架的结构特性,改变外倾角往往会连带改变前束角。必须采用动态微调,锁紧偏心螺丝后需再次晃动车身以确认参数是否发生漂移(Hysteresis)。
3. 路试与电子系统匹配(ADAS Calibration)
机械调整完毕后,必须进行路试。测试项目应包括:直线脱手行驶测试(评估跑偏)、大角度转向回正测试、以及NVH主观评估。路试结束后,使用OBD诊断电脑重置方向盘转角传感器(SAS零位学习),确保ESP系统认知到的零位与机械零位绝对一致。
控制臂更换前后的定位参数对比
通过量化的数据,我们可以直观地看到衬套老化与新件安装对底盘几何的干预程度。
更换前,老化的衬套由于过度屈服会导致外倾角负值增加;更换全新的高刚度控制臂后,悬挂被重新“托起”,此时必须将参数重新标定至原厂中值。
K&C参数演变案例分析
为了清晰展示这一过程,我们引用一份典型的前置前驱(FF)中型轿车麦弗逊下控制臂更换测试报告。该车行驶里程为12万公里,旧控制臂后液压衬套发生破裂漏油,前橡胶衬套发生偏心屈服。选用江西光益生产的强化型实心橡胶控制臂总成进行替换。
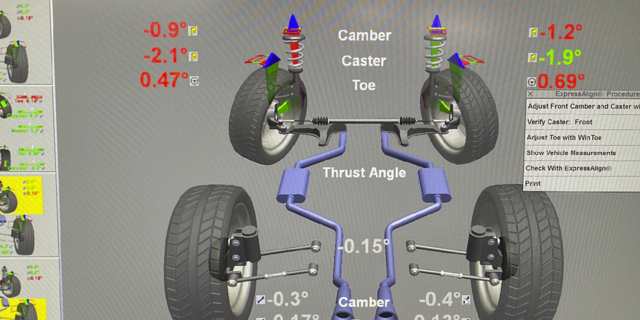
| 测量状态 | 左前外倾角 (Camber) | 右前外倾角 (Camber) | 总前束 (Total Toe) | 衬套径向位移 (模拟1kN载荷) |
|---|---|---|---|---|
| 更换前 (旧件) | -1.50° (超差) | -1.65° (超差) | -0.30° (向外发散) | > 2.8 mm (橡胶失效屈服) |
| 更换后 (未定位) | -0.20° (正值偏向) | -0.15° (正值偏向) | +0.45° (过度内八字) | < 0.6 mm (光益新件高刚度) |
| 重新四轮定位后 | -0.50° (标准) | -0.50° (标准) | +0.10° (标准) | 正常设计区间内 |
工程逻辑解读:
- 更换前:由于旧衬套完全丧失了径向支撑力(推脱力测试表明其已低于标准值的40%),车重压迫下摆臂向外侧位移,导致车轮呈现严重的“趴脚”状态(负外倾角增大),前束也因为拉杆的相对位置变化而呈现出前束外倾(Toe-out)。
- 更换后未定位:装上江西光益严格把控硫化工艺的新控制臂后,由于新橡胶的硬度(Shore A)和径向刚度恢复至出厂巅峰水平,下摆臂被重新推回正确的三维坐标系中。但此时,原来与旧臂匹配的转向拉杆长度未变,这就导致车轮瞬间变成了正外倾倾向且前束严重向内(Toe-in)。若以此状态行驶,不仅油耗激增,两侧胎肩将在几百公里内被啃噬殆尽。
- 最终校准:通过调整拉杆,使几何参数回到原厂公差的中间值,底盘恢复出厂动态平衡。
更换控制臂后的四轮定位成本分析
在汽车后市场运维或主机厂售后索赔核算中,四轮定位绝非无谓的附加成本,而是保障总成寿命的风险控制手段。
通常一次标准的3D四轮定位费用在200-800元之间。相较于因定位失准导致需要提前更换两条新轮胎及加速损坏新控制臂的数千元损失,定位投资回报率极高。
B2B视角的总体拥有成本(TCO)分析
对于大型售后品牌商和车队管理者而言,必须从全生命周期成本(LCC)的角度审视这项支出。
-
主机厂售后索赔大数据的启示:
江西光益在协助部分Tier 1配套厂进行索赔件(Warranty Claims)故障模式分析时发现,有超过30%的“控制臂异响/早期脱胶”退件,其金属表面未见撞击痕迹,但橡胶断面呈现典型的多向疲劳撕裂。追溯维修工单发现,这些车辆在更换上一个零件时均未开具四轮定位的工时费。为了节省几百元的定位费,最终导致整条控制臂在质保期内二次索赔,产生高昂的零部件、物流和拆装工时成本。 -
隐性成本的预防式阻断:
当客户因为更换控制臂而支付了几百到上千元的费用后,如果一周后发现车辆跑偏或高速方向盘抖动而发生客诉,门店的信誉损失是不可估量的。四轮定位不仅是对机械的校正,更是底盘维修后的“完工质检(Quality Gate)”。它能在交车前排查出可能存在的悬挂装配不到位、转向拉杆弯曲变形等潜在隐患。
DIY定位与专业定位设备的对比
随着硬派越野或改装文化的兴起,部分车主尝试使用拉线或卷尺进行手动定位调整。但在现代高精度底盘系统中,这种方式存在极大的局限性。
卷尺或拉线定位仅能做应急粗调,无法精确测量外倾角和推进角,更无法与现代车辆的电子传感器相匹配。更换控制臂必须依赖高精度的专业3D或激光定位仪。

精度公差与微观测量的技术壁垒
现代汽车底盘是一个高度敏感的闭环系统,江西光益在研发底盘件时,对金属衬套孔径的机加工精度控制在0.02mm以内,以此匹配微观的运动学变化。
-
测量分辨率的代差降维打击:
DIY拉线法依靠肉眼读取标尺,其测量误差通常在±2毫米(换算成角度约等于±0.3度以上)。而现代大型修理厂配备的3D高清晰数字相机四轮定位仪,其测量精度可达0.01度。对于麦弗逊悬架,0.3度的外倾角误差足以导致车辆在湿滑路面的极限过弯侧向G值下降10%,这涉及到直接的行车安全。 -
动态补偿与全维映射的缺失:
专业的四轮定位系统在测量前需要进行“轮辋补偿(Run-out Compensation)”操作,通过推动车辆转动车轮,电脑能自动消除因轮毂变形或夹具安装误差带来的数据污染。这是DIY测量完全无法实现的。DIY只能测量静止下的两点距离,而专业设备能构建出车桥的三维虚拟模型,并计算出关键的主销后倾角(Caster)和主销内倾角(SAI/KPI),这对于评估控制臂安装硬点位置是否变形具有决定性的诊断意义。
结论
更换底盘控制臂后进行标准的三维四轮定位,是底盘系统恢复出厂NVH性能和动态运动学特性的必经之路。忽视这一环节不仅会导致轮胎灾难性磨损,更会让精准调校的控制臂衬套长期承受异常预压应力,引发早期撕裂和不可逆的底盘异响。
江西光益减震系统有限公司凭借15年底盘NVH开发与橡胶金属件制造经验,深知每一组控制臂的动态刚度与疲劳寿命都与整车底盘参数息息相关。我们不仅配备400T大型硫化机等全套现代化生产线,更拥有独立的多轴动态刚度实验室。光益减震致力于以直接制造商的身份,为全球售后品牌商及Tier 1企业提供从配方定制、CAE仿真分析到批量交付的联合研发服务。如果您正寻找具备OEM配套标准的高可靠性悬挂系统合作伙伴,欢迎提交3D模型或技术图纸,我们的工程团队将为您提供专业的定制评估。




